

WWZMDiB capteurs infrarouges IR Module photoélectrique réfléchissant à 3 fils pour Arduino
2 000 CFA
| Marque | WWZMDiB |
| Couleur | Blanc |
| Source d’énergie | Électrique avec fil |
| Poids de l’article | 0,03 kilogrammes |
| Portée maximale | 30 centimètres |
En stock (peut être commandé)
Description du produit
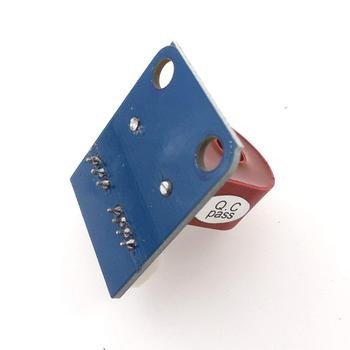
Français WWZMDiB modules de capteur d’évitement d’obstacles infrarouges à 3 fils photoélectrique réfléchissant pour voiture intelligente Arduino Robot
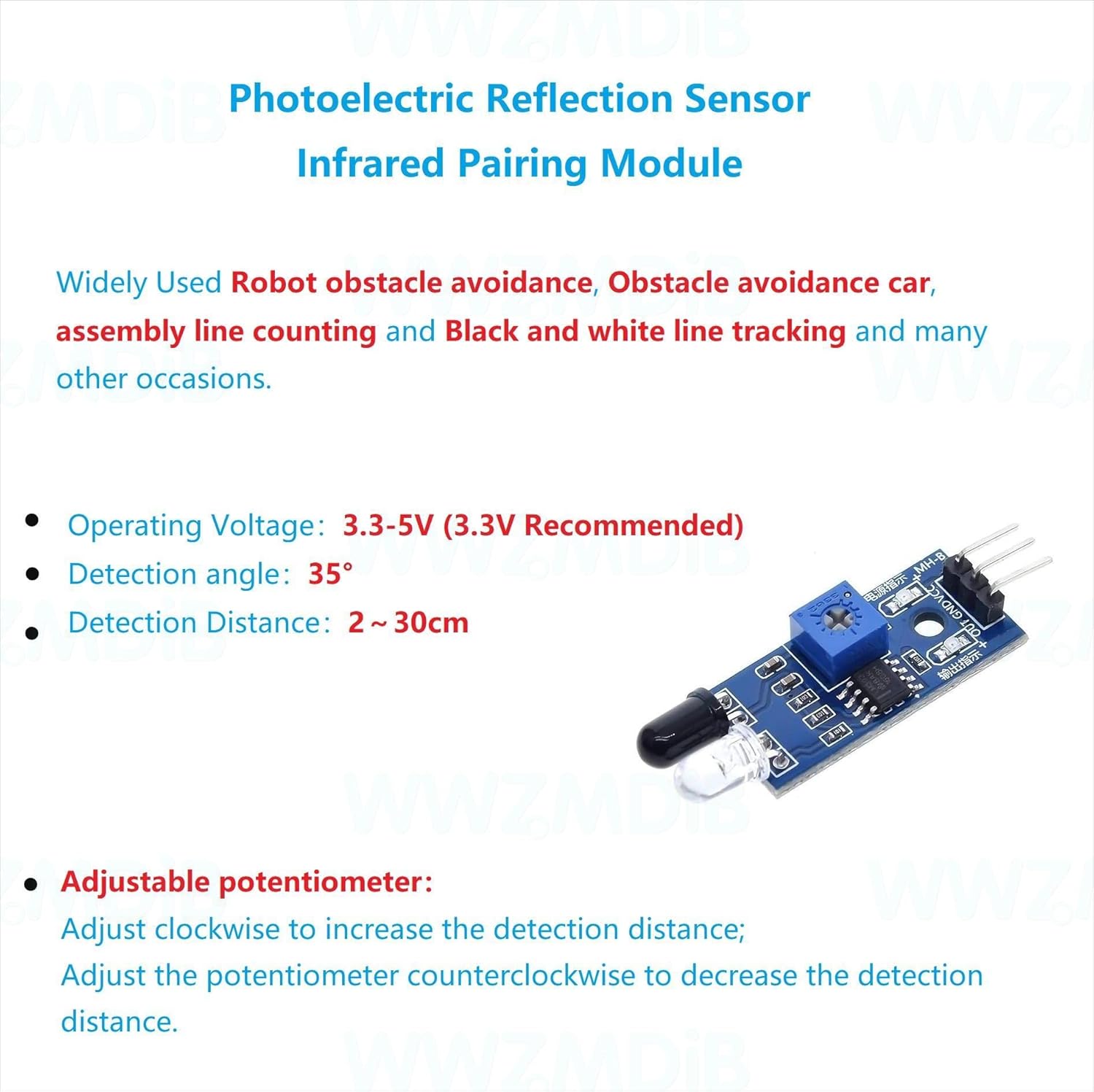
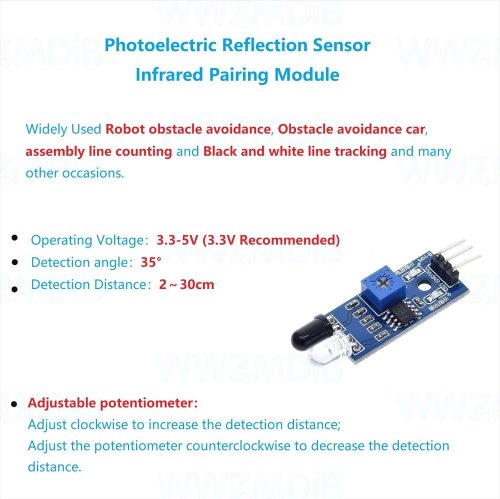
💎【Module d’appairage infrarouge de capteur de réflexion photoélectrique】: Largement utilisé pour l’évitement d’obstacles de robot, la voiture d’évitement d’obstacles, le comptage de chaîne de montage et le suivi de ligne noir et blanc et de nombreuses autres occasions.
⚡【Tension de fonctionnement】: 3,3-5 V (3,3 V recommandé)
🎯【Angle de détection】: 35°
🎯【Distance de détection】: 2~30cm
🎯【Potentiomètre réglable】: Ajustez dans le sens des aiguilles d’une montre pour augmenter la distance de détection ; ajustez le potentiomètre dans le sens inverse des aiguilles d’une montre pour diminuer la distance de détection.
Français : 🎯【Emballage inclus】: Capteur de réflexion photoélectrique Module de couplage infrarouge;
Fils de raccordement mâle à femelle 21 cm/8 pouces;
Fils de raccordement femelle à femelle 21 cm/8 pouces.
Mode d’emploi :
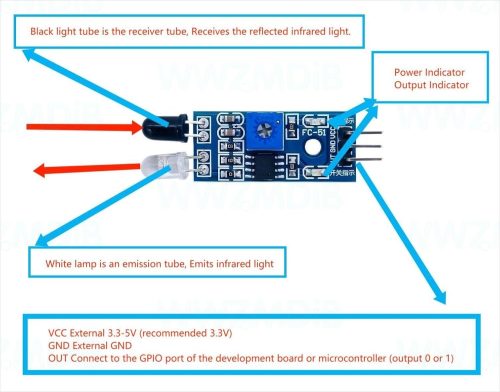
1. Lorsqu’il est sous tension, le voyant d’alimentation est toujours allumé;
2. Lorsque la distance est éloignée et qu’aucun obstacle n’est détecté, le voyant de sortie est éteint et la broche OUT génère un niveau élevé
3. Lorsque la distance est courte, lorsqu’un obstacle est détecté, le voyant de sortie est allumé et le port OUT génère un niveau bas
4. Lorsque la distance est courte, lorsqu’un obstacle noir est rencontré, la lampe noire ne peut pas le recevoir, le voyant de sortie est éteint et la broche OUT génère un niveau élevé
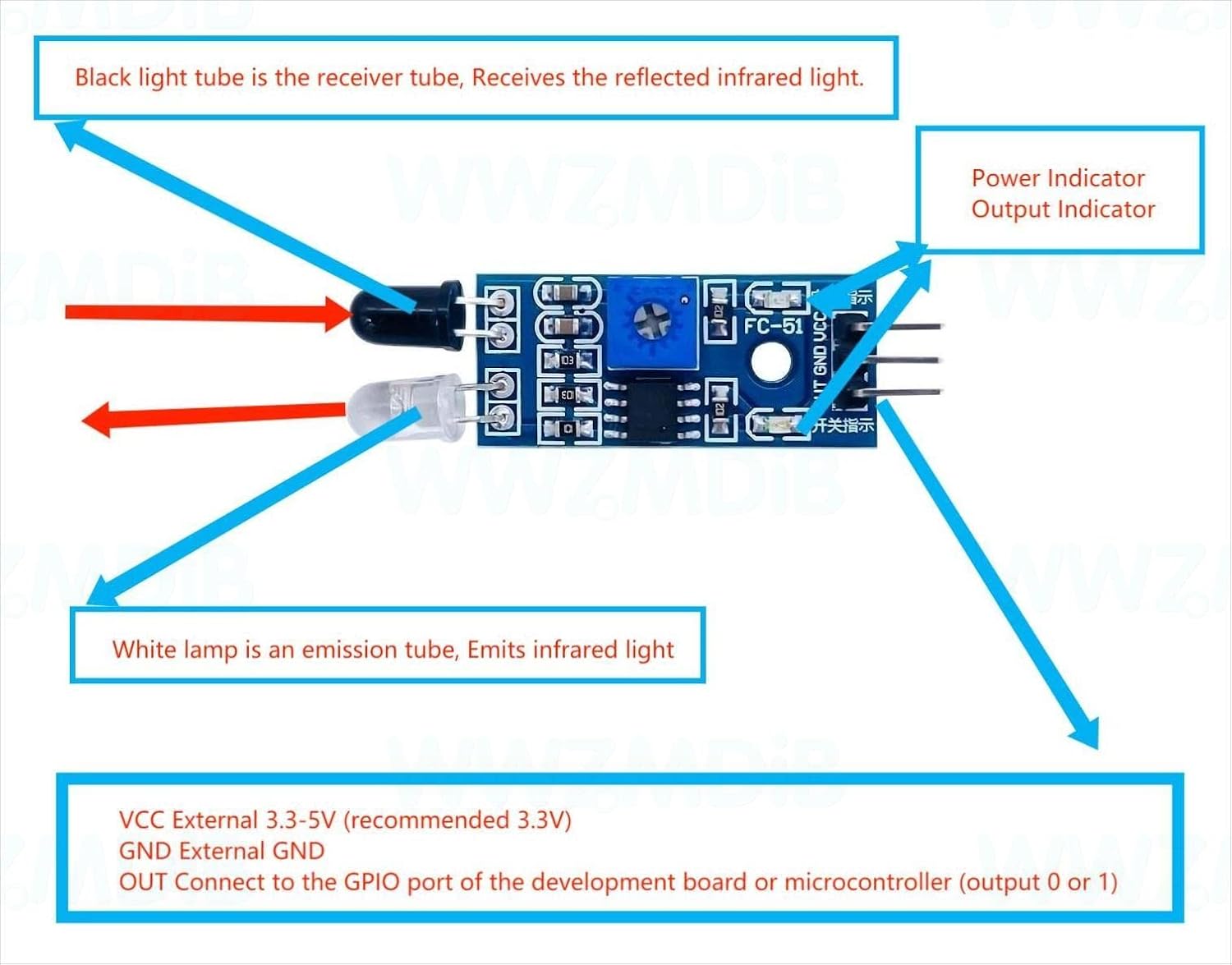
5. Le tube émetteur (lampe blanche) émet des rayons infrarouges d’une certaine fréquence. Lorsque la direction de détection rencontre un obstacle (surface réfléchissante), les rayons infrarouges sont réfléchis et reçus par le tube récepteur (lampe noire). Après avoir été traités par le circuit comparateur, le voyant de sortie s’allume et émet simultanément un signal numérique (signal de faible niveau).
Seuls les clients connectés ayant acheté ce produit ont la possibilité de laisser un avis.
Produits similaires




![KINGSO 500pcs Diode Électroluminescente Ampoule LED (100 chaque couleur) [Classe énergétique A+]](https://yuupee.com/wp-content/uploads/2020/02/products-2830.jpg)

Arduino
KINGSO 500pcs Diode Électroluminescente Ampoule LED (100 chaque couleur) [Classe énergétique A+]




Arduino et Raspberry Pi
Adaptateur Raspberry Pi Power – 2.5A Power Supply (Micro USB)








Arduino et Raspberry Pi
Avis
Il n’y a pas encore d’avis.